Bàn tay robot cảm biến - Thiết bị điện tử bắt chước cuộc sống
Cảm biến, truyền động và tính toán tích hợp với cấu trúc 3D là một công nghệ mới nổi của các hệ thống thông minh có tiềm năng hỗ trợ robot trong việc đưa ra các quyết định phức tạp cũng như sự khéo léo giống như con người
- Nhật Bản: Thị trường robot giao hàng tới hộ gia đình đang trở nên cấp thiết
- Robot dần mở rộng ứng dụng trong lĩnh vực công nghiệp phụ trợ Việt Nam
- Sony ứng dụng AI để sản xuất robot đầu bếp
Mặc dù lĩnh vực tự động hóa, robot từ trước đến nay đã có sự tiến bộ đáng kể, nhưng lĩnh vực tự động hóa, AI vẫn còn rất nhiều cơ hội để phát triển; ví dụ, robot vẫn không thực hiện được các nhiệm vụ phức tạp như con người và không thể bắt chước các đặc điểm và tương tác phức tạp như các hệ thống sinh học, nhận biết môi trường của con người thông qua xúc giác và khứu giác.
Các khả năng của các hệ thống robot gần đây đã được mở rộng sang các môi trường không có cấu trúc, có thể bao gồm chuyển động độc lập qua địa hình ngẫu nhiên, thao tác với các đối tượng một cách tinh vi hoặc giao tiếp và tương tác trực tiếp với con người.

Cảm biến truyền động và tính toán tích hợp chặt chẽ vào các cấu trúc 3D có thể cho phép một thế hệ robot mới của các hệ thống thực sự thông minh và phức tạp, chẳng hạn như robot có kỹ năng vận động, kỹ năng vận động và khả năng vật lý dựa trên phản hồi được cung cấp bởi chuyên ngành sinh học trong cơ thể.
Lĩnh vực robot ngày nay đang cố gắng tái tạo các khả năng này thông qua các lớp da điện tử, cơ nhân tạo và các thiết bị điện toán, v.v. được đặt trên bề mặt bên ngoài của robot hoặc bên trong cơ thể cứng nhắc của chúng để tránh các thiết bị bị hỏng trong quá trình hoạt động.
Các cảm biến cảm ứng và da điện tử khác nhau được phát triển cho robot ngày nay, bao gồm cả những mô phỏng bắt chước một số tính năng trên da người, như dấu vân tay và tăng độ phân giải pixel xúc giác (taxel), được phát triển trên bề mặt mềm dẻo và mềm mại cho phép đặt chúng phù hợp mặt ngoài của cơ thể. Tuy nhiên, điều này đi kèm với thách thức hao mòn trong quá trình sử dụng thường xuyên, chi phí tốn kém rất nhiều.
Trong một nghiên cứu gần đây được công bố trên Advanced Intelligent Systems (Hệ thống thông minh tiên tiến), Giáo sư Ravinder Dahiya cùng nhóm nghiên cứu tại Đại Học Glasgow đã trình diễn một phương pháp mới để giải quyết các vấn đề khó khăn ở trên bằng cách tích hợp các cảm biến cảm ứng vào bên trong các ngón tay của bàn tay robot.
Bàn tay robot do các nhà nghiên cứu phát triển được chế tạo bằng cách sử dụng máy in 3D với hệ thống truyền động được gói gọn trong lõi của khu vực lòng bàn tay, cùng với các cảm biến áp suất điện dung được in 3D và mạch đọc được tích hợp trong các ngón tay của robot.
Điều này đạt được bằng cách sửa đổi hệ thống mô hình hóa máy in 3D hợp nhất, kết hợp với cơ chế ép, đẩy để in đồng thời các kết cấu polyme và mực dẫn điện. Điều này cho phép in các chức năng của bàn tay robot giả, với các cảm biến được nhúng ở đầu ngón tay để phát hiện áp lực.
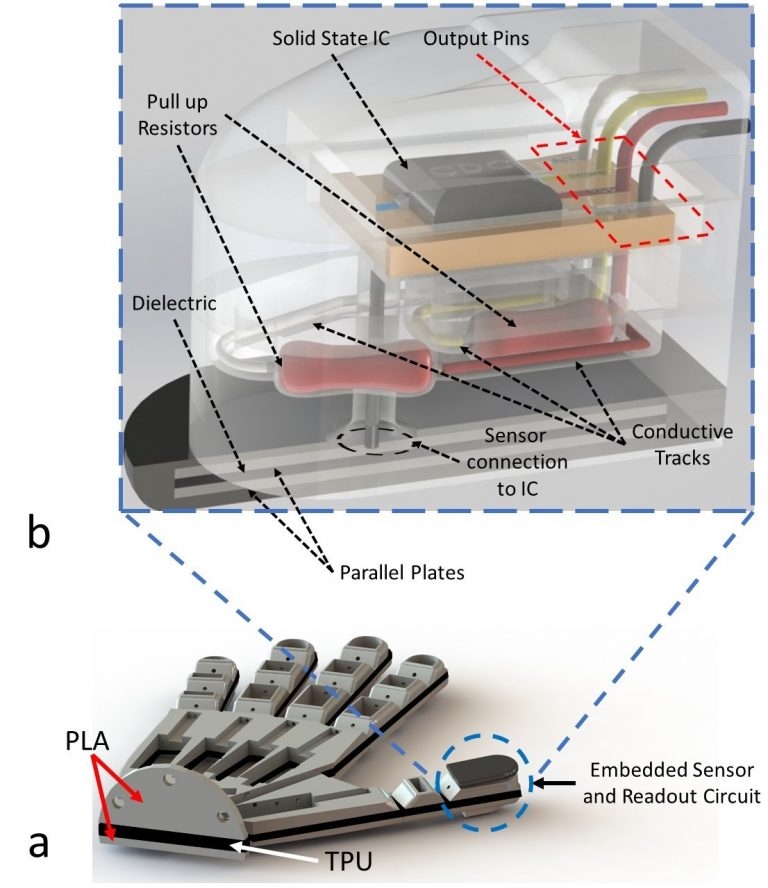
Bàn tay in 3D với cảm biến xúc giác bên trong
a. Thiết kế CAD bàn tay với ngón tay cảm biến thông minh tích hợp cảm biến cảm ứng điện dung mềm và mạch đọc
b. Thiết kế CAD cấu trúc bên trong của ngón tay.
Giáo sư Dahiya, giám đốc Electronic Systems Design Centre (Trung tâm thiết kế hệ thống điện tử) và lãnh đạo của nhóm Bendable Electronics and Sensing Technologies (Công nghệ cảm biến và điện tử Bendable) cho biết, các yếu tố cảm biến tích hợp chặt chẽ trong các cấu trúc in 3D có thể mở đường cho một thế hệ mới của hệ thống vật liệu thông minh thực sự.
Trong nghiên cứu, sự kết hợp của ba vật liệu dẫn điện, cụ thể là sợi tổng hợp axit polyactic đen dẫn điện, keo bạc dính và mực dựa trên than chì, đã được thử nghiệm làm điện cực cho cảm biến điện dung cùng với hai vật liệu điện môi: một sợi TPU linh hoạt và cao su silicon hai phần. Cảm biến hiệu suất cao nhất bao gồm miếng dán bạc và cao su mềm, cung cấp độ nhạy 0,002115 kPa -1 trong phạm vi áp suất 0kPa-50kPa.
Bàn tay in 3D với cảm biến áp suất mềm nhúng là một cách tiếp cận hiệu quả để có được các cấu trúc thông minh phức tạp. Sự đơn giản của quy trình chế tạo giới thiệu một phương pháp chế tạo thay thế hiệu quả về chi phí cho các hệ thống cảm biến xúc giác đòi hỏi phải có các thiết bị chuyên dụng, đắt tiền và phức tạp.
Về vấn đề này, so với các bàn tay robot hoặc chân tay giả hiện đại, phương pháp được trình bày có thể thiết kế được bàn tay robot với cấu trúc tương tự như bàn tay con người với chi phí, giá cả sản xuất phải chăng mà có thể đem lại nhiều chức năng hơn với các sản phẩm trước đây.
Hơn nữa, phương pháp in 3D đa vật liệu còn có thể mở ra một triển vọng mới về chế tạo robot trong đó khả năng tích hợp cảm biến để có thể tạo ra cách tiếp cận mới, cung cấp sử dụng hiệu quả không gian 3D cho các thành phần được tích hợp.
Theo Tạp chí Điện tử





















Tối thiểu 10 chữ Tiếng việt có dấu Không chứa liên kết
Gửi bình luận